Ingenieros crean un robot con «patas de ave» que puede atrapar objetos
Ingenieros de la Universidad de Stanford (EE.UU.) crearon robots inspirados en aves, que al ser unidos a drones, les permite agarrar objetos y posarse sobre diferentes tipos de superficies.
«No es fácil imitar cómo las aves vuelan y se posan», comentó William Roderick, uno de los autores de la investigación, quien agregó que «después de millones de años de evolución» las aves hacen que levantar vuelo o posarse sobre una rama «parezca tan fácil», pese a «toda la complejidad y variabilidad de las ramas de los árboles que se encuentran en un bosque».
Tras un exhaustivo estudio, los laboratorios de los ingenieros de Stanford Mark Cutkosky y David Lentink lograron desarrollar estos robots con patas inspiradas en las de los pájaros, proyecto que fue llamado ‘pinza aérea estereotipada inspirada en la naturaleza’ (SNAG, por sus siglas en inglés). «Queremos poder aterrizar en cualquier lado, eso es lo que lo hace emocionante desde una perspectiva de ingeniería y robótica», explicó Lentink.

Para desarrollar el dispositivo, los ingenieros reunieron información a partir de una de las especies más pequeñas de loros, para lo que utilizaron cámaras de alta velocidad para observar cómo se posaban sobre varas de distintos tamaños y materiales, como madera, espuma, papel de lija o teflón. Además, esas varas estaban equipadas con sensores cuya función era detectar la fuerza empleada para posarse, descansar y despegar.
«Nos sorprendió que hicieran las mismas maniobras aéreas sin importar en qué superficie se estaban posando», expresó Roderick, quien detalló que «dejan que sus patas manejen la variabilidad y complejidad de las texturas».
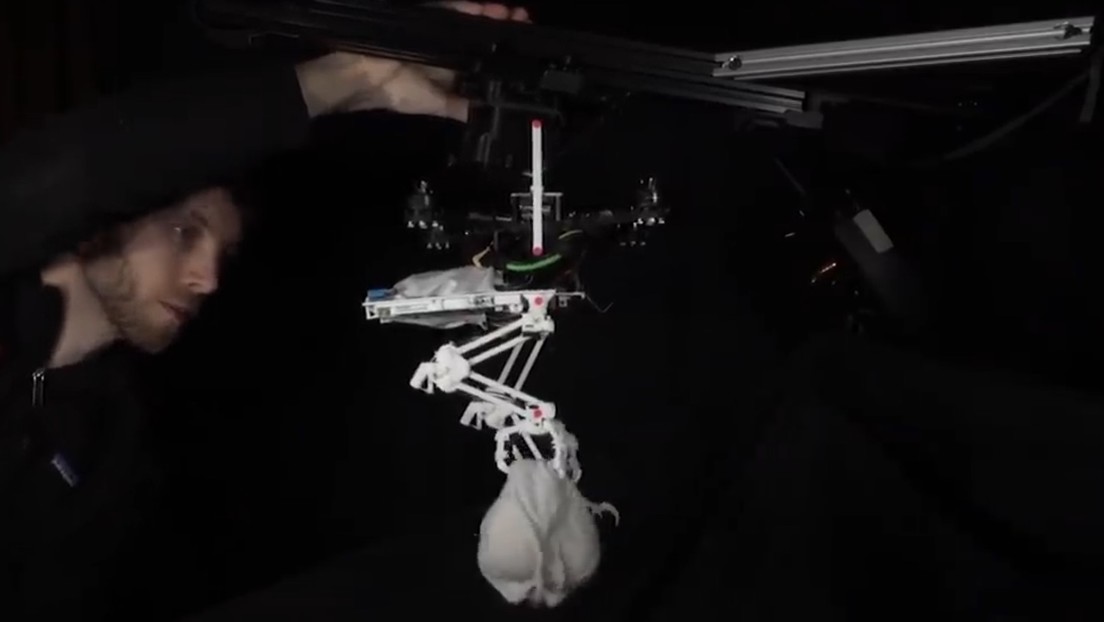
Al igual que los loros, SNAG realiza su aterrizaje siempre de la misma manera, aunque sus patas están basadas en las del halcón peregrino, debido al tamaño del dron. En lugar de huesos presenta una estructura en 3D que tardó 20 repeticiones en perfeccionarse, mientras que motores y tanzas reemplazan a los músculos y los tendones.
Cada una de las patas del robot cuenta con un motor que les permite moverse hacia adelante y hacia atrás y con otro encargado de manejar el agarre, acción que dura 20 milisegundos. Una vez que se posa sobre una superficie, un acelerómetro en la pata derecha le indica al robot que ha aterrizado, tras lo cual se activa un algoritmo de equilibrio que le permite inclinarse hacia adelante para evitar que caiga.
Los ingenieros también probaron la capacidad de este dispositivo de atrapar distintos objetos, como bolsas de fríjoles o pelotas de tenis, y comprobaron que pudo posarse sobre ramas reales en bosques de Oregón.
Respecto a los usos de este dispositivo, afirmaron que son numerosos y que incluso podrían ser incorporados a estructuras que no sean drones. «Si pudiéramos tener un robot que actuara como un pájaro, eso podría desbloquear formas completamente nuevas de estudiar el medio ambiente», concluyó Roderick.
RT



